
ПЧ ATV61 предназначен для работы с нагрузкой с переменным моментом сопротивления. "Переменный момент" означает нелинейную зависимость момента от скорости вращения.
При этом ПЧ осуществляет компенсацию скольжения.
На приведенном графике показано:
точка "а" - точка работы напрямую от сети;
точка "б" - точка работы от ПЧ с включенной компенсацией скольжения.
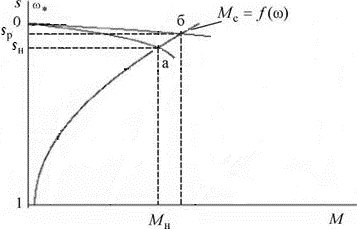
Из приведенного графика видно, что момент двигателя при работе от ПЧ с включенной компенсацией скольжения больше чем номинальный момент. Поэтому, соответственно, ток двигателя при работе в точке "б" превышает номинальное значение. Данный эффект особенно заметен для мощных двигателей.
Компенсация скольжения настраивается параметром SLP (Меню 1.3 либо Меню 1.4). Параметр SLP доступен, если закон управления двигателем отличен от UF2, UF5, UFq и Syn.
Для корректной компенсации скольжения необходимо ввести данные двигателя и провести автотюнинг.
Некоторые двигатели не позволяют проводить компенсацию скольжения. Это обусловлено особенностями конструкции. При включенной компенсации скольжения ток двигателя в установившемся режиме периодически увеличивается и ПЧ переходит в режим токоограничения. В этом случае отключите компенсаицю скольжения.
Для отключения компенсации скольжения необходимо установить значение параметра SLP равным нулю: SLP = 0.
При этом ПЧ осуществляет компенсацию скольжения.
На приведенном графике показано:
точка "а" - точка работы напрямую от сети;
точка "б" - точка работы от ПЧ с включенной компенсацией скольжения.
Из приведенного графика видно, что момент двигателя при работе от ПЧ с включенной компенсацией скольжения больше чем номинальный момент. Поэтому, соответственно, ток двигателя при работе в точке "б" превышает номинальное значение. Данный эффект особенно заметен для мощных двигателей.
Компенсация скольжения настраивается параметром SLP (Меню 1.3 либо Меню 1.4). Параметр SLP доступен, если закон управления двигателем отличен от UF2, UF5, UFq и Syn.
Для корректной компенсации скольжения необходимо ввести данные двигателя и провести автотюнинг.
Некоторые двигатели не позволяют проводить компенсацию скольжения. Это обусловлено особенностями конструкции. При включенной компенсации скольжения ток двигателя в установившемся режиме периодически увеличивается и ПЧ переходит в режим токоограничения. В этом случае отключите компенсаицю скольжения.
Для отключения компенсации скольжения необходимо установить значение параметра SLP равным нулю: SLP = 0.
Опубліковано для: Schneider Electric Україна

Потрібна допомога?
Інструмент вибору продукту
Швидко та легко знаходьте потрібні продукти й допоміжне обладнання для своїх завдань.
Розрахувати вартість
Ставте свої запитання щодо продажів онлайн, і з вами зв’яжеться фахівець
Де придбати?
Зручний пошук найближчого дистриб’ютора, магазина або спеціалізованого партнера Schneider Electric у вашому регіоні.
Довідковий центр
Знайдіть усі необхідні ресурси для підтримки в одному місці.