
Параметр FBS используется для масштабирования сигнала обратной связи.
Рассмотрим структурную схему ПИД-регулятора:
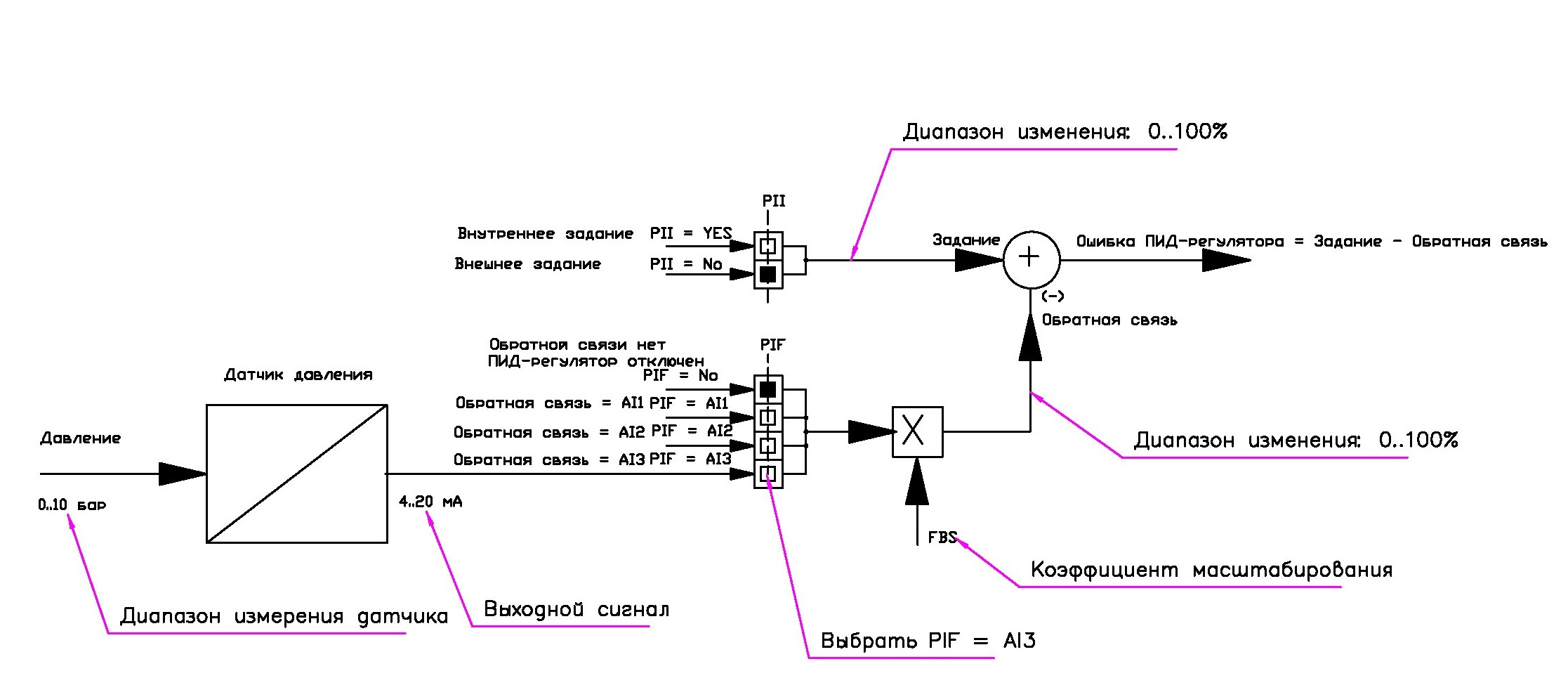
На входе ПИД-регулятора присутствуют два сигнала: сигнал задания и сигнал обратной связи. Разность сигналов (задание минус обратная связь) называется ошибкой ПИД-регулятора. Задача ПИД-регулятора - минимизировать ошибку.
Параметр rPI - внутреннее задание ПИД-регулятора. Переключение между внутренним и внешним заданиями осуществляется при помощи параметра PII (при PII = Yes на вход ПИД-реуглятора поступает внутреннее задание).
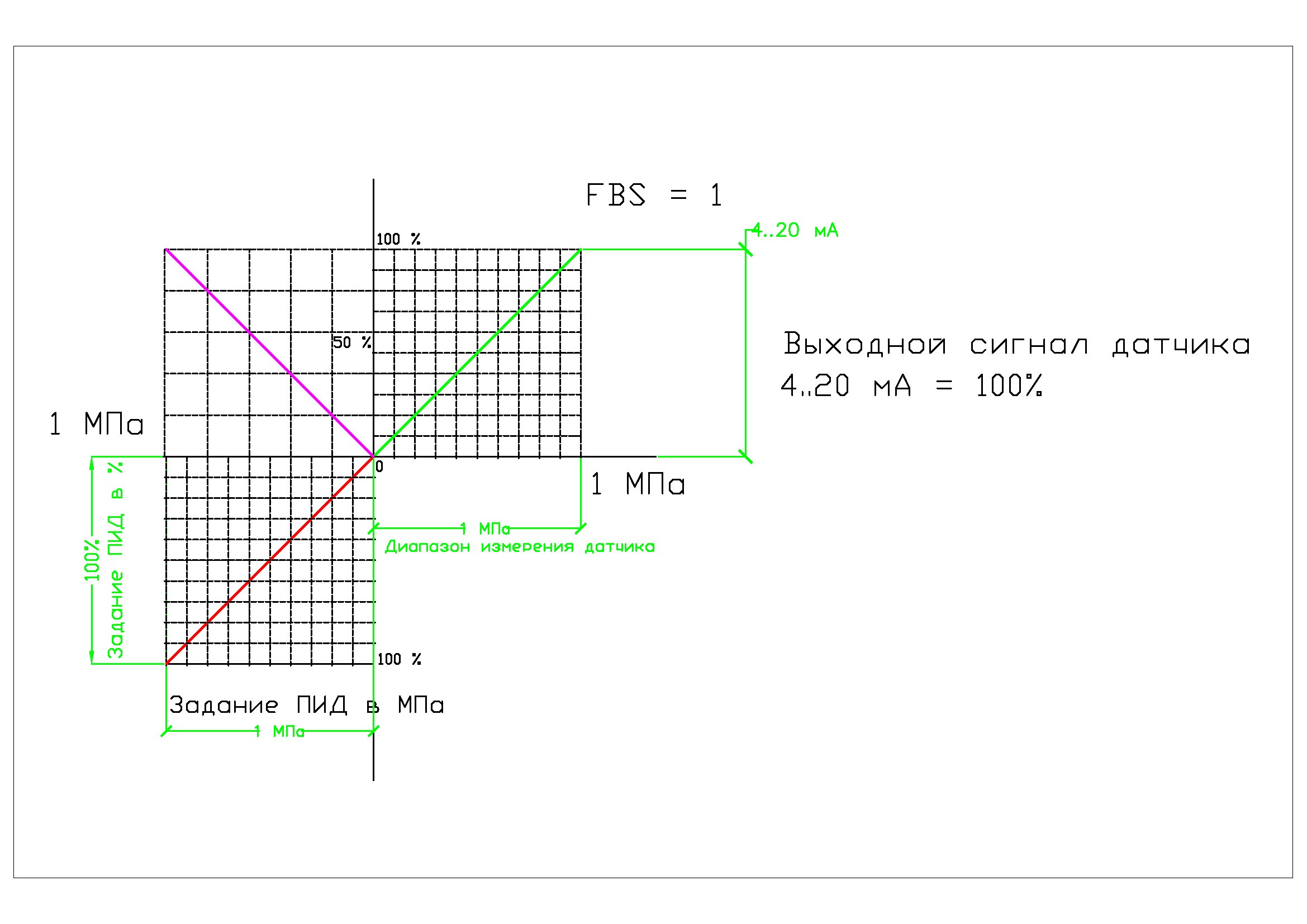
Если FBS = 1, то диапазону изменения сигнала с датчика обратной связи (например, датчик с диапазоном измерения 0..10 бар и выходным сигналом 4..20мА, 4..20 мА = 0..10 бар, например) соответствует изменение rPI от 0% до 100%.
Если необходимо, чтобы диапазоны отличались, то нужно сделать FBS отличным от 1.
Рассмотрим вариант, когда для необходимо иметь диапазон изменения уставки (задания) давления 0..10 бар при изменении внутреннего задания rPI в диапазоне 0..100%. При этом датчик давления имеет диапазон измерения 0..16 бар.
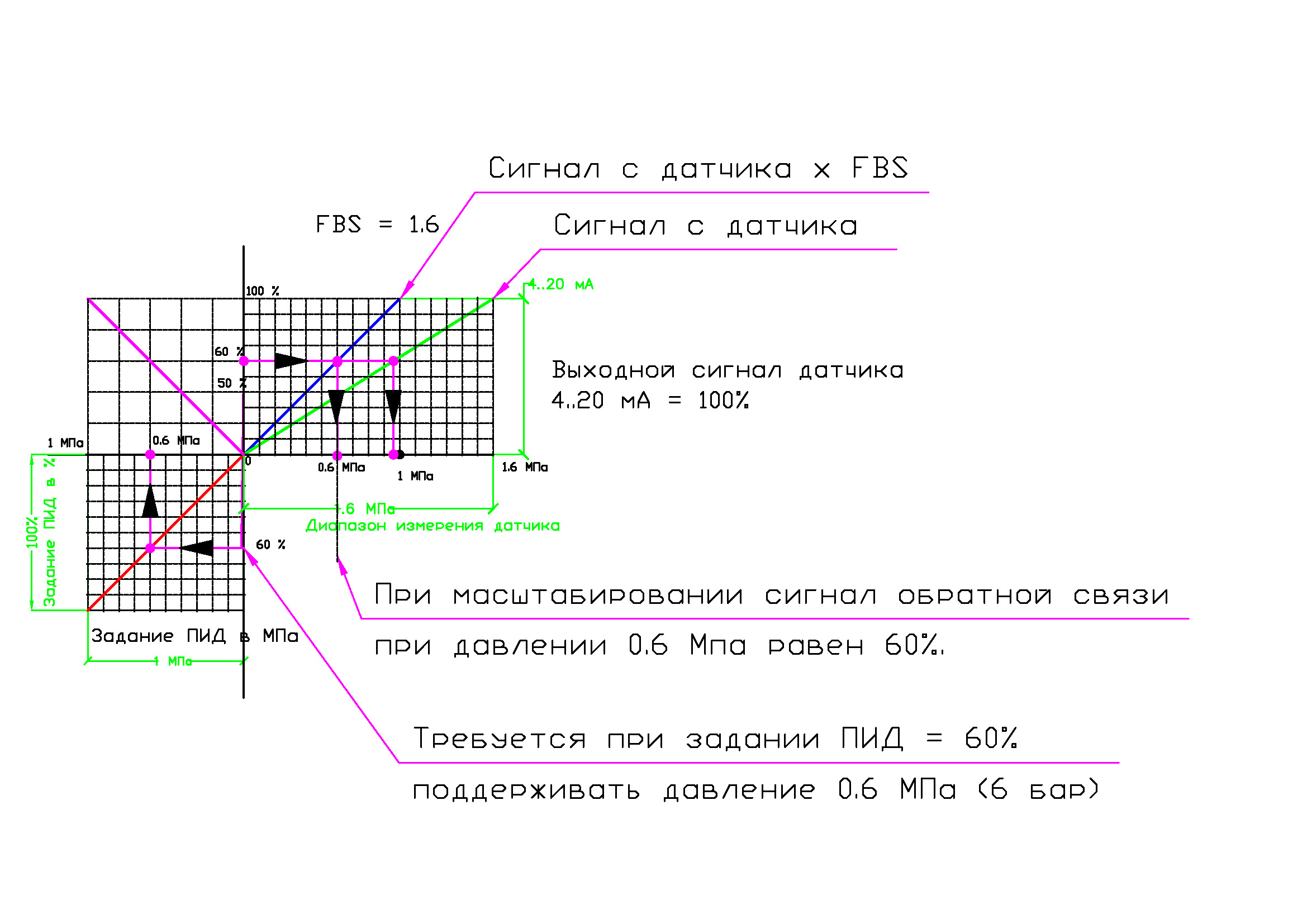
На приведенном рисунке показано применение коэффициента FBS.
Показано, что заданию rPI = 60% должно соответствовать 0,6 МПа или 6 бар. Датчик давления имеет диапазон измерения 0..16 бар. При введении коэффициента FBS = 1.6 мы получаем скорректированный (отмасштабированный) сигнал обратной связи, равный 60%, при давлении 6 бар.
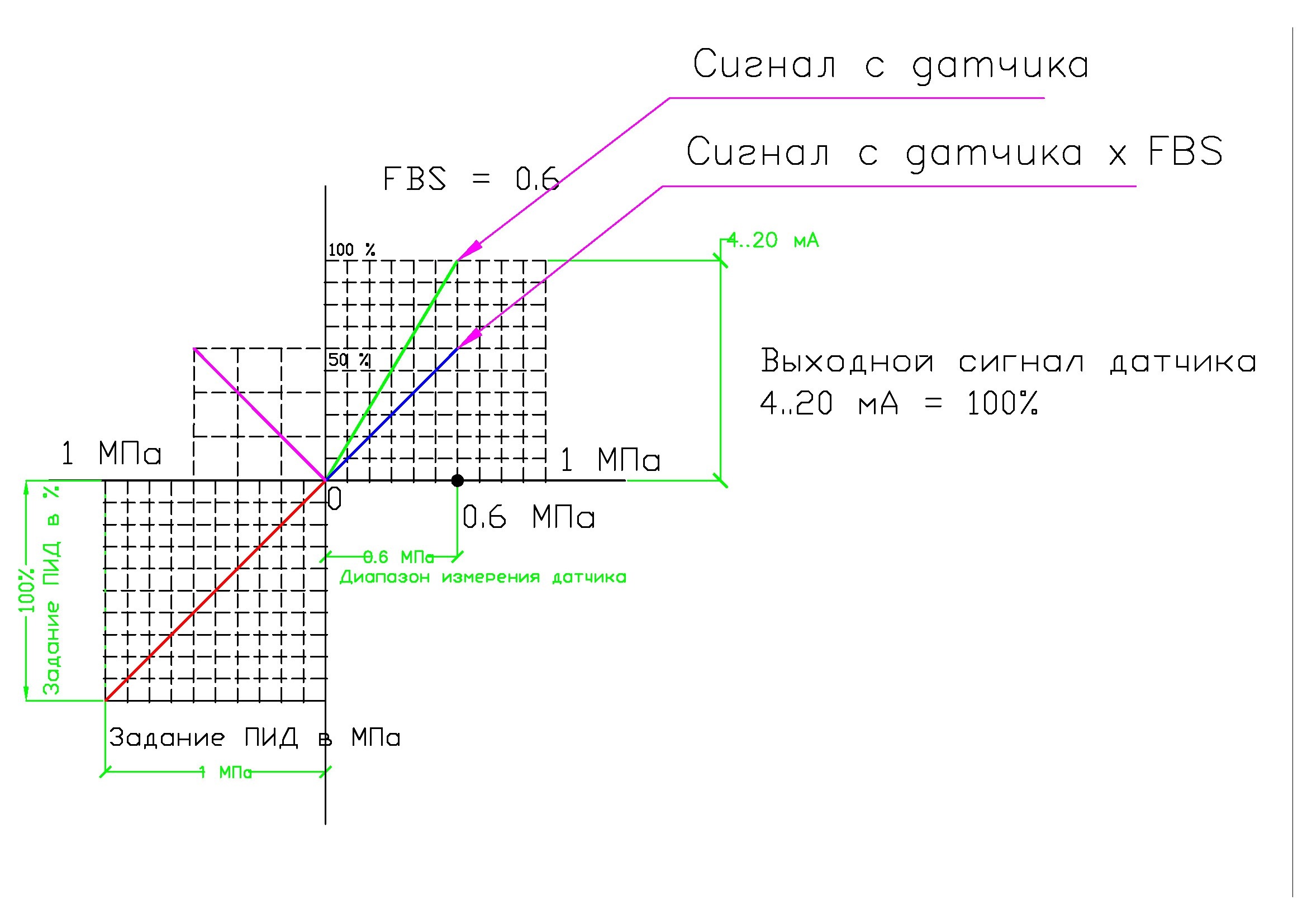
Аналогично можно масштабировать сигнал обратной связи, если диапазон датчика меньше, чем требуемый диапазон задания:
Рассмотрим структурную схему ПИД-регулятора:
На входе ПИД-регулятора присутствуют два сигнала: сигнал задания и сигнал обратной связи. Разность сигналов (задание минус обратная связь) называется ошибкой ПИД-регулятора. Задача ПИД-регулятора - минимизировать ошибку.
Параметр rPI - внутреннее задание ПИД-регулятора. Переключение между внутренним и внешним заданиями осуществляется при помощи параметра PII (при PII = Yes на вход ПИД-реуглятора поступает внутреннее задание).
Если FBS = 1, то диапазону изменения сигнала с датчика обратной связи (например, датчик с диапазоном измерения 0..10 бар и выходным сигналом 4..20мА, 4..20 мА = 0..10 бар, например) соответствует изменение rPI от 0% до 100%.
Если необходимо, чтобы диапазоны отличались, то нужно сделать FBS отличным от 1.
Рассмотрим вариант, когда для необходимо иметь диапазон изменения уставки (задания) давления 0..10 бар при изменении внутреннего задания rPI в диапазоне 0..100%. При этом датчик давления имеет диапазон измерения 0..16 бар.
На приведенном рисунке показано применение коэффициента FBS.
Показано, что заданию rPI = 60% должно соответствовать 0,6 МПа или 6 бар. Датчик давления имеет диапазон измерения 0..16 бар. При введении коэффициента FBS = 1.6 мы получаем скорректированный (отмасштабированный) сигнал обратной связи, равный 60%, при давлении 6 бар.
Аналогично можно масштабировать сигнал обратной связи, если диапазон датчика меньше, чем требуемый диапазон задания:
Опубликовано для:Schneider Electric Казахстан
